薬院に新規オープンした雑貨屋「SOMEWARE」の店内で開催された「みんなのハンガー展」に作品を出品させていただきました!
お誘いいただいた下村さん、ありがとうございます!
「みんなのハンガー展」はMDFという木製の板(厚さ5mm)を、SOMEWAREと隣接するMUTSUKADO FAB STATIONのレーザーカッターでカットして、ハンガーを作ろうという企画です。
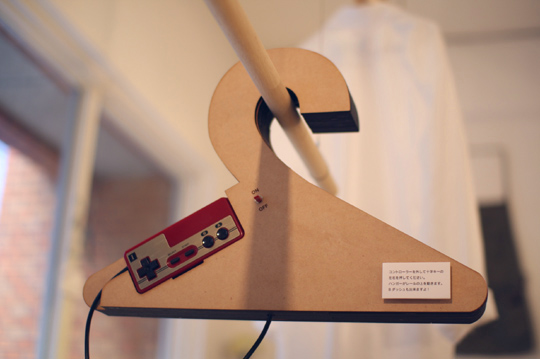
ファミコンハンガー

カット以外に刻印も使わせていただきました!(ON・OFFの文字)
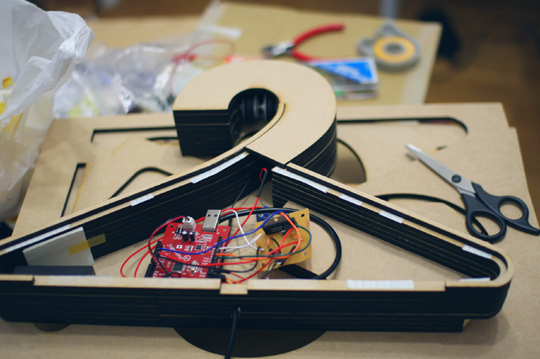
上の写真は僕が出品したファミコンハンガーです。
十字キーの左右ボタンを押すとハンガーが動きます。
もちろんBダッシュもできます。
Aボタンでファミコンっぽい音のブザーも鳴るのですが、カバーの中に入れたらほとんど聞こえなくなりましたw
制作工程の記事もあります。
↓実際に動かしている動画
みんなのハンガー展
会期:2013年5月18日(土)- 5月26日(日)6月2日(日)
12:00 – 20:00 (最終日は18:00まで)
5月29日(水)は店休日
金額:入場無料
場所:SOMEWARE
2013 年 5 月 27 日|制作|No Comments
ファミコンハンガーのざっくりな制作工程です。
ファミコンハンガーの概要はファミコンのコントローラーでハンガーに着いているタイヤを回して、棒に掛けたハンガーを動かすぞー!というものです。
以前、ArduinoでDCモータを動かすテストは済んでいたのでArduinoのプログラムと電子回路まわりは、下の図のように組めば大丈夫だろうと想定できたのですが、
(Japaninoを使っているのは既に乾電池で動くように出来ているからという理由です)
「モータ - ギヤ - タイヤ」の位置固定をどうすればいいか考えていた所、カホパーツセンターでタミヤの「ユニバーサルプレート」なるのもを見つけて、これでなんとか位置固定できるんじゃないかと思い、同じくタミヤのスリックタイヤセットやマブチモータ等といっしょに購入して試してみました。
本来ならここで事務所の3Dプリンタを活用すればCool!(サングラスマーク)だったのですが、3Dプリンタは経験不足の為、タミヤのキットを使った方が早いし確実っぽいということでキットで制作することにしました。
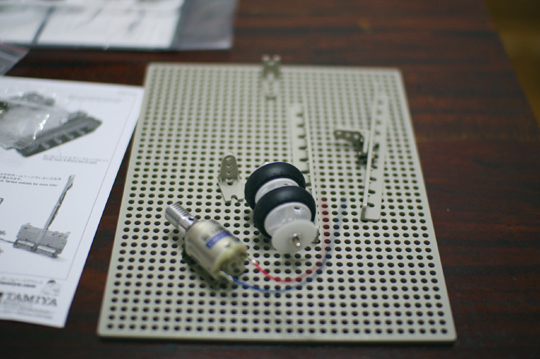
購入したユニバーサルプレート等
こんな感じで組んでみると、固定の仕方が良くないのかタイヤの回り方がちょっと力不足みたいでした。
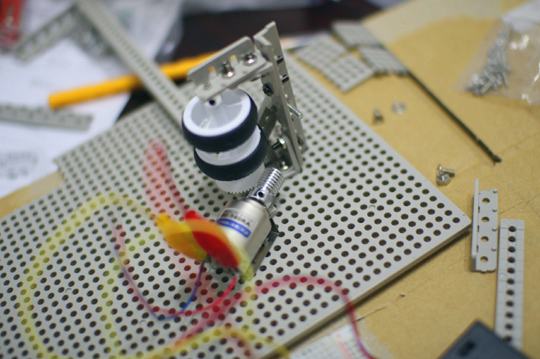
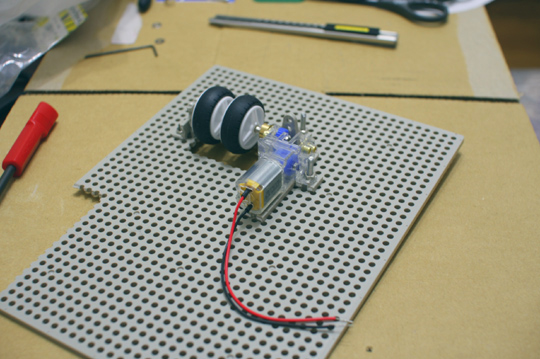
力不足問題をどうしようと考えていると、タミヤの「ミニモーター標準ギヤボックス」というギヤ比を8速まで調整できて、モータとギヤがコンパクトにまとまっている、今回の用途にピッタリなものを見つけたのでこちらを使うことにしました。
8速の中で一番パワーの出る「87.8:1」でセット
これで、ハンガーが動くくらいのパワーが出るようになりました。

一緒に入っていたグリスがかわいい
そうこうしている内にオークションで購入したファミリーコンピューターが到着!

やっぱりかっこいいな、ファミコン!
早速Arduinoとコントローラーの連携テストを行います。
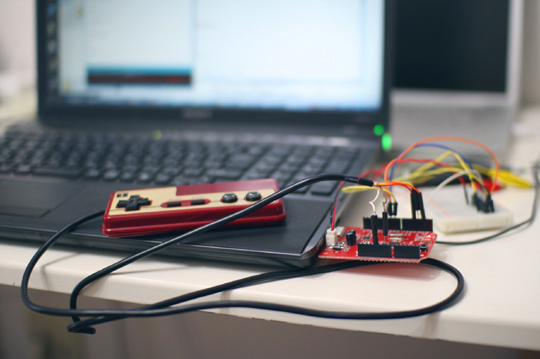
ありがたいことにArduinoでファミコンコントローラーの信号を読み取る「NESpad」というArduinoのライブラリがあったので、それを使わせていただきました。
お次はMDFのカット用データを作成します。
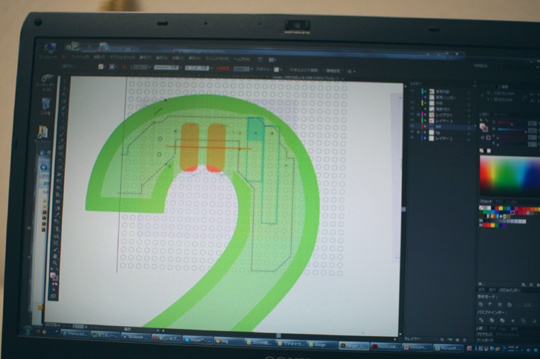
Illustratorの画面
MUTSUKADO FAB STATIONでレーザーカットしてもらいます。

「みんなのハンガー展」主催者の宇佐さんがカットの仕上げをしているところ
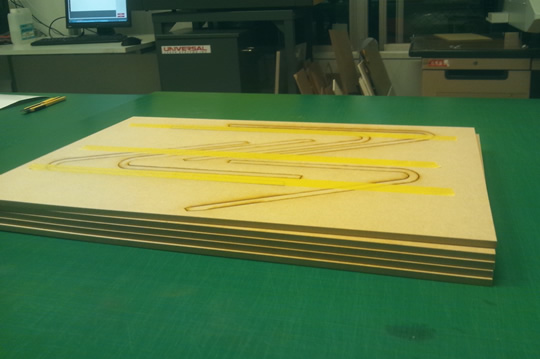
カットされたMDFの板
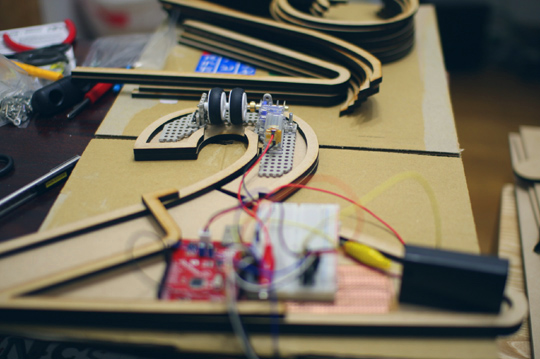
さっそく仮組
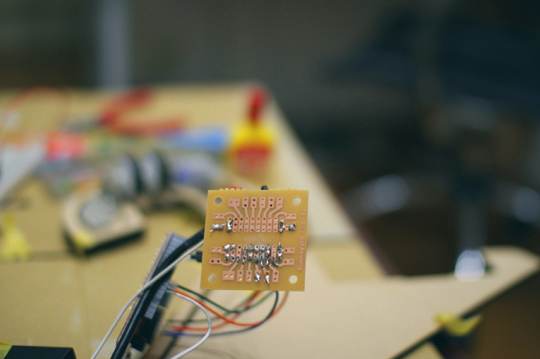
基板にハンダ付け(ド下手でお恥ずかしい)
板を重ねて木工用ボンドで固定させます。

タイヤの部分はこんな感じ
裏面だけは電池を変える時に取り外せるように、ボンドではなく両面テープで固定します。
出来上がったファミコンハンガーの紹介は次の記事
・ファミコンハンガー:「みんなのハンガー展」参加作品
2013 年 5 月 27 日|制作|No Comments
Arduinoで複数のRGBフルカラーLEDを制御してみようと思ったのですが、まずArduinoでPWM出力できるピンは6つしかなく、フルカラーLEDを1つ制御するには3つのPWM出力ピンを使う為、ArduinoだけだとフルカラーLED2つまでしか制御できないということになります。
そこで、もっと多量のPWM出力を制御できないか調べたところ、TLC5940というICから16ピン分のPWM出力を制御できるということが分かりました。さらにTLC5940どうしでデイジーチェーン接続していけば、32、48、、というようにPWM出力のピン数を増やしていけるみたいです。

さっそく購入したTLC5940
そしてLEDのカソード側とTLC5940のPWM出力を繋ぐので、RGB LEDはアノードコモンのものが必要になります。

角型フルカラーLED OSTA71A1D-A アノードコモン
このLEDの足をブレッドボードに4つの導線に分けて刺そうとすると、あと1穴分幅が足りなくてブレッドボードに刺さりません。むむむ、もどかしいです。
他に良さそうなアノードコモンのRGB LEDを見つけれなかったので、このLEDの足に銅線をはんだ付けしてブレッドボードに刺せるようにします。(もっと簡単な方法があったのでしょうかね?)
LEDの足をヒートクリップで挟んで熱からLEDを守る!あ、この写真は違う足を挟んでたw

足が長くなり、横たわるしかなくなったLED
お次は回路を組みます。
「Arduino 日本語リファレンス」のTLC5940のページにあった回路を参考に組みました。
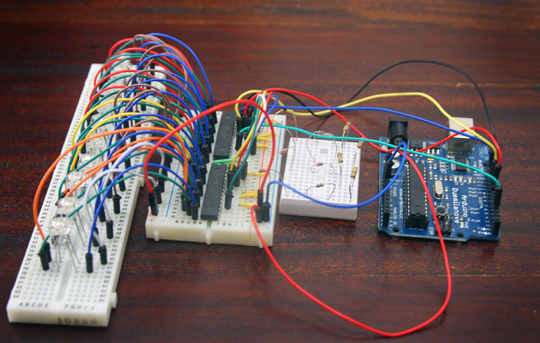
2つのTLC5940をデイジーチェーン接続で繋いでいます。RGB LEDは10個
ランダムな色で順番に光るようにした動画です。
Arduinoのコードはこちら
// "tlc_config.h"の値を下記に変更
// #define NUM_TLCS 2
#include "Tlc5940.h"
#define MAX_BRIGHTNESS 4095
void setup() {
Tlc.init();
}
void loop() {
int myR = random(4)*(MAX_BRIGHTNESS/3);
int myG = random(4)*(MAX_BRIGHTNESS/3);
int myB = random(4)*(MAX_BRIGHTNESS/3);
//channelの 0 と 31 は未接続
for (TLC_CHANNEL_TYPE channel = 1; channel < (NUM_TLCS * 16)-2; channel += 3) {
Tlc.clear();
Tlc.set(channel + 0, myR);
Tlc.set(channel + 1, myG);
Tlc.set(channel + 2, myB);
Tlc.update();
delay(70);
}
}
今後はLEDの数をもっと増やしてテストを続けて行きたいと思います。
お金がかかります。ブルジョアの道楽です。
2012 年 8 月 16 日|制作|2 Comments
最近の一眼レフデジタルカメラには、大体外部デバイスからシャッターを切ったりするための端子がついているので、今回は「Arduinoで命令を出してシャッターを切る」というのに挑戦してみたいと思います。
下の写真が、Canon EOS 40Dのリモコン端子(N3タイプ)の口です。Kissシリーズだとステレオフォンジャックの端子で行けるみたいなんですけど、EOSシリーズはすごいマニアックな端子となっています。

今回はこの端子と導線の部分だけが必要なんですが、マニアックな端子なのでなかなか見つかりません。
で、webでざっと見たかぎりこの端子が付いているもので一番安かったのが、「エツミ 電子リモートスイッチ」ってやつです。amazonで購入しました。
![エツミ 電子リモートスイッチ RM-L1-C3 キヤノンN3[3ピン]タイプ用](http://ecx.images-amazon.com/images/I/31eYxot4bIL._SL150_.jpg)
エツミ 電子リモートスイッチ RM-L1-C3 キヤノンN3[3ピン]タイプ用

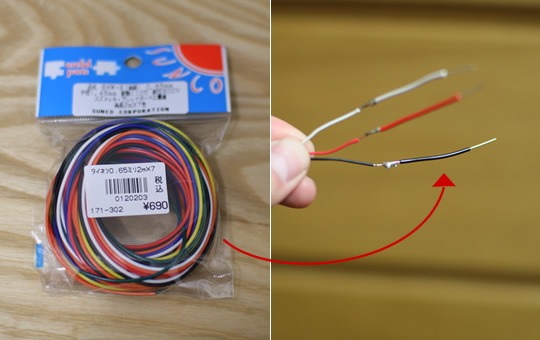
2日後、N3の端子が届きました。
さっそく導線をむき出しにしてみます。

赤、白、黒の3本のコードが入っていたのですが、テスターで調べたところ、黒がGNDってことがとりあえず判明しました。
そこで恐る恐る、白と黒の導線を接触させてみると、「シュコーッ」とフォーカスを合わせる音がするではないですか!盛り上がってきましたぞ!
次に赤と黒の導線を接触させるとシャッターを切る音が!ちゃんと撮影されてるみたいです!
後は好きなタイミングでこの接触を行うだけとなります。
どうやって接触させているのかを、下記のサイトを参考にさせていただきました。
・なんでも作っちゃう、かも。:一眼レフカメラのシャッターを制御する
参考サイトによると「フォトカプラ」という部品を使っているみたいなので調べてみると、
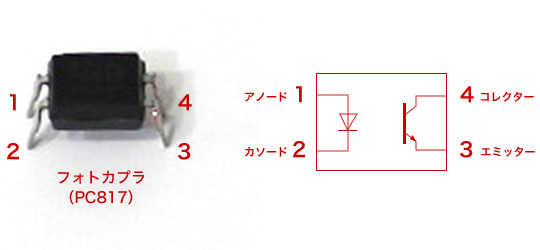
(1)と(2)の間の発光ダイオードを発光させることで、(3)と(4)を導通させるしくみみたいです。
しかも(1)(2)と(3)(4)間では絶縁を保ったままというのがポイントです。
フォトカプラを使うとして、次は回路を組むのですが、N3端子コードの先程のむき出しヨリ線だとブレッドボードに刺さらないので、カホパーツセンターに行った時ににその事を相談してみると、ブレッドボードに刺さる導線があるので、ヨリ線にはんだ付けしてから使うといいとの解答をもらいました。
頼もしいなー。カホパーツセンター・・・、バンザーイ!
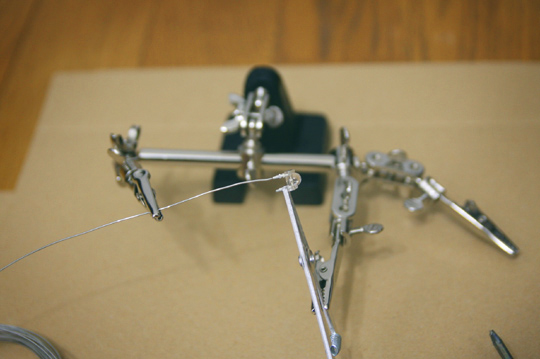
これがその導線で、ちょうど赤・白・黒があったので、ペアルックにしてはんだ付け。
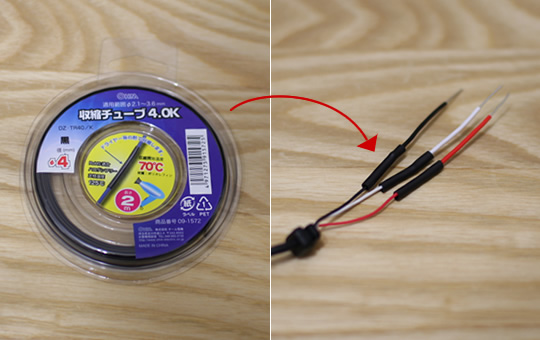
はんだ付けした部分がむき出しで、間違って接触するといけないので、縮小チューブを被せました。
縮小チューブはライターの火等で熱を加えると、ギュっと小さく締まるという優れもののゴムチューブです。
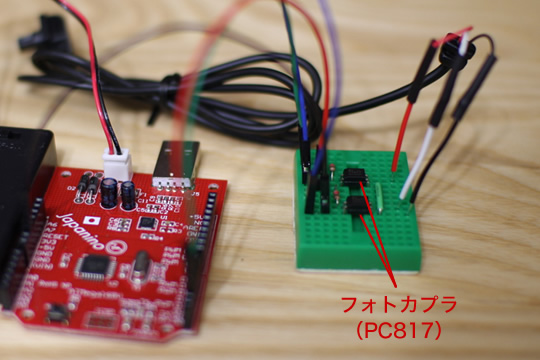
Arduino(Japanino)と繋げた回路です。
Arduinoのスケッチも先ほどの「なんでも作っちゃう、かも。:一眼レフカメラのシャッターを制御する」を参考にさせていただきました。大変助かりました!
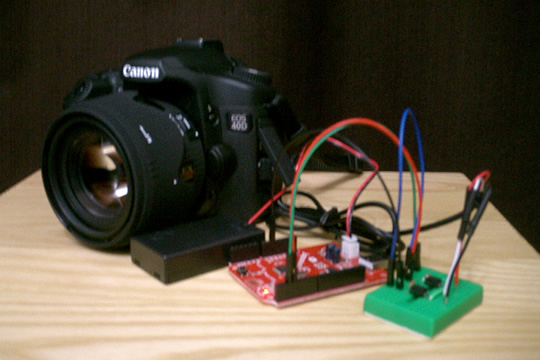
実際に動いているものがこちら。5秒に一回シャッターを切るというインターバル撮影が行われています。
山でテスト撮影したいなー!
結局山につながりますw
2011 年 2 月 15 日|制作|5 Comments
2月19日(土)に、福岡市のAIPCafeでしかじろうさん主催で、みんなでArduinoをいじろうっていう楽しげな会がありますよ。
僕も参加します!
詳細はこちら→ 「Arduino勉強会」
残りの席数があとわずかですが、興味がある方は上記サイトより参加申し込みできますよー。
せっかくこういうblogやってるので、お知らせでした。
2011 年 2 月 15 日|制作|No Comments